

![[ICRA] Distributionally robust optimization with unscented transform for learning-based control](http://coregroup.snu.ac.kr/wp-content/uploads/2018/11/Depositphotos_4892867_xl-2015.jpg)
The paper “Distributionally Robust Optimization with Unscented Transform for Learning-Based Motion Control in Dynamic Environments” has been accepted for presentation at the 2023 IEEE International Conference on Robotics and Automation (ICRA).
Distributionally Robust Optimization with Unscented Transform for Learning-Based Motion Control in Dynamic Environments
by Astghik Hakobyan, and Insoon Yang
Abstract:
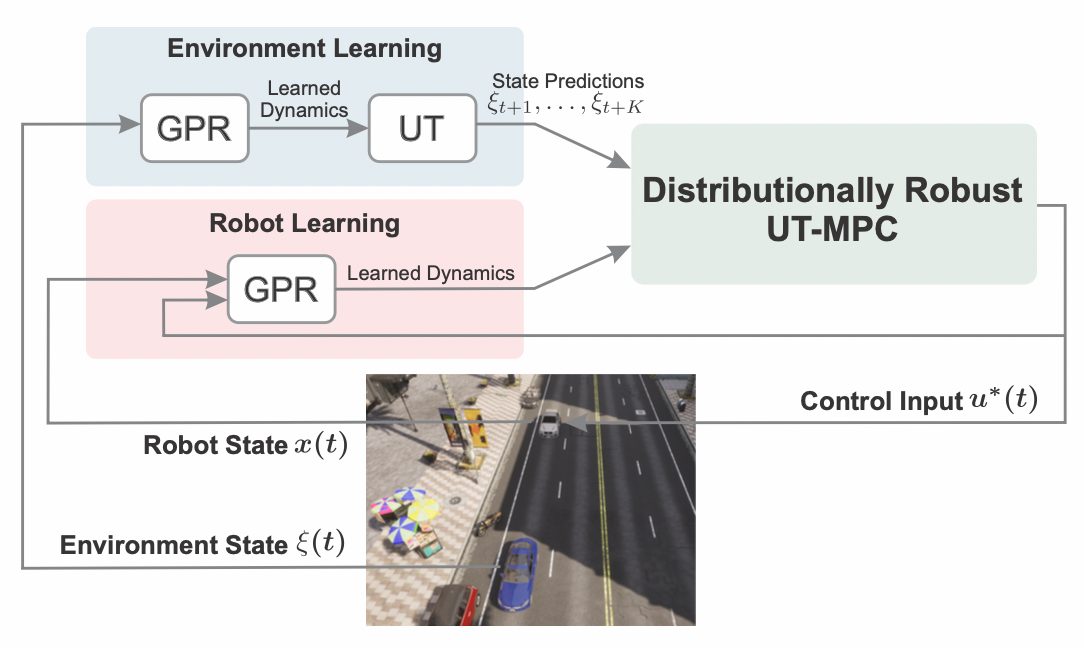
Safety is one of the main challenges when ap- plying learning-based motion controllers to practical robotic systems, especially when the dynamics of the robots and their surrounding dynamic environments are unknown. This issue is further exacerbated when the learned information is unreliable and inaccurate. In this paper, we aim to enhance the safety of learning-enabled mobile robots in dynamic environments from the perspective of distributionally robust optimization (DRO) and the unscented transform (UT). Our method infers the unknown dynamics of both the robot and the environment by adopting Gaussian process regression with an uncertainty propagation scheme based on UT to improve prediction ac- curacy. This leads to a novel learning-based model predictive control (MPC) method in which state information about both the robot and the environment is propagated via UT. The proposed method uses DRO to proactively limit the risk of collisions or other unsafe events in the presence of learning errors. However, the distributionally robust risk constraint is intractable because it involves a separate infinite-dimensional optimization problem. To overcome this challenge, we exploit UT with modern DRO techniques to replace the risk constraint with its simple upper bound. The performance and the utility of our method are demonstrated through simulations in au- tonomous driving scenarios, showing its capability to enhance safety and computational efficiency.


