

![[T-RO] Distributionally robust motion control using CVaR](http://coregroup.snu.ac.kr/wp-content/uploads/2018/11/Depositphotos_4892867_xl-2015.jpg)
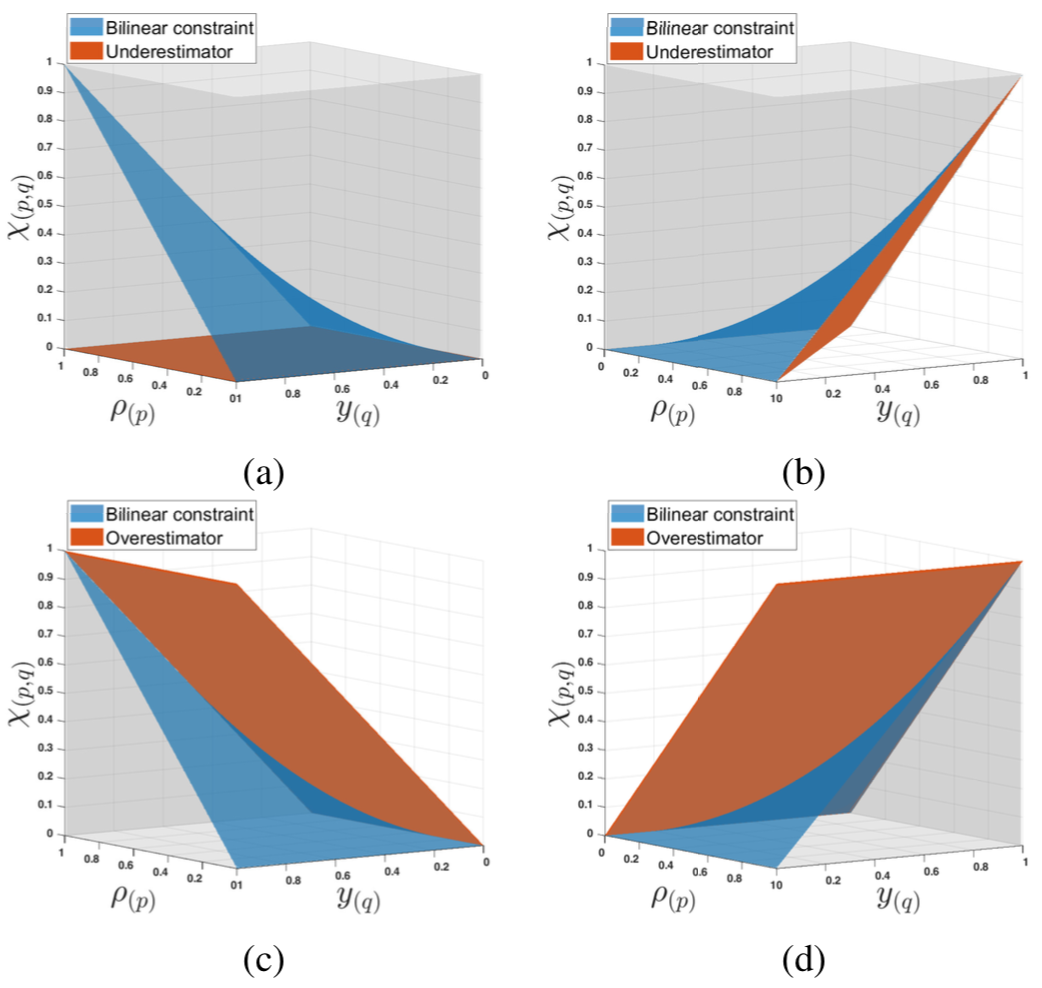
The paper “Wasserstein distributionally robust motion control for collision avoidance using conditional value-at-risk” has been accepted for publication in the IEEE Transactions on Robotics. It presents a novel risk-aware motion control tool for collision avoidance in cluttered environments. In particular, the proposed scheme is robust against errors in distribution information about obstacles’ uncertain movements. A spatial branch-and-bound algorithm is designed to find a globally optimal solution to the distributionally robust MPC problem.
Wasserstein distributionally robust motion control for collision avoidance using conditional value-at-risk
by Astghik Hakobyan, and Insoon Yang
Abstract: In this paper, a risk-aware motion control scheme is considered for mobile robots to avoid randomly moving obstacles when the true probability distribution of uncertainty is unknown. We propose a novel model predictive control (MPC) method for limiting the risk of unsafety even when the true distribution of the obstacles’ movements deviates, within an ambiguity set, from the empirical distribution obtained using a limited amount of sample data. By choosing the ambiguity set as a statistical ball with its radius measured by the Wasserstein metric, we achieve a probabilistic guarantee of the out-of-sample risk, evaluated using new sample data generated independently of the training data. To resolve the infinite-dimensionality issue inherent in the distributionally robust MPC problem, we reformulate it as a finite-dimensional nonlinear program using modern distributionally robust optimization techniques based on the Kantorovich duality principle. To find a globally optimal solution in the case of affine dynamics and output equations, a spatial branch-and-bound algorithm is designed using McCormick relaxation. The performance of the proposed method is demonstrated and analyzed through simulation studies using nonlinear dynamic and kinematic vehicle models and a linearized quadrotor model. The simulation results indicate that, even when the sample size is small, the proposed method can successfully avoid randomly moving obstacles with a guarantee of out-of-sample risk, while its sample average approximation counterpart fails to do so.


